
Visión xeral
O guindastre ponte, comunmente coñecido como "condución", é un tipo de maquinaria de elevación moi utilizado nas empresas industriais e mineiras, o seu mecanismo de operación está composto por tres sistemas de condución independentes, sistema de condución de coche, sistema de condución de gancho, inversor K-DRIVE para o por riba dos tres sistema de condución reformado con éxito, o seguinte describe principalmente o proceso de transformación do sistema de condución antes e despois de camiñar.

Esquema Vantaxes
- Control vectorial de bucle aberto de corrente orientada ao campo, variables do motor totalmente desacopladas, gran par de baixa frecuencia, resposta rápida, etc.
- KD600 adopta o modo de control vectorial de bucle aberto gratuíto PG e o modo V/F vectorizado e amplifica a configuración do nivel de potencia da primeira marcha;
- Rango de frecuencia: configuración de segmento 0,5-600 Hz, axuste continuo continuo;
- Rango de tensión de traballo: 380V ± 20%, e a tensión do bus cae a 360VDC instantaneamente para un funcionamento sen problemas;
- Capacidade de sobrecarga: 150 % da corrente nominal, 1 minuto permitido; 200 % de corrente nominal, 1s permitidos;
- Características do par: par de arranque, superior a 2 veces o par nominal; Par de baixa frecuencia, superior a 1,6 veces o par nominal a 1 Hz; O par de freado é maior que o par nominal.
Características de funcionamento
- O mecanismo de elevación da grúa ten un gran par de arranque, que normalmente supera o 150% do par nominal. Se se consideran sobrecargas e outros factores, deberase proporcionar polo menos o 200 % do par nominal durante o proceso de arranque e aceleración;
- Cando o mecanismo de elevación vai cara abaixo, o motor estará en estado de xeración de enerxía rexenerativa e debe ser freado por consumo de enerxía ou retroalimentación rexenerativa á rede;
- A carga do mecanismo de elevación cambia drasticamente cando o obxecto levantado sae ou toca o chan, e o conversor de frecuencia será capaz de controlar a carga de impacto sen problemas;
- Como a velocidade de desprazamento do mecanismo de desprazamento dianteiro e traseiro do guindastre non é elevada durante o deseño mecánico, o conversor pódese utilizar para unha sobrevelocidade adecuada para mellorar a eficiencia de traballo.
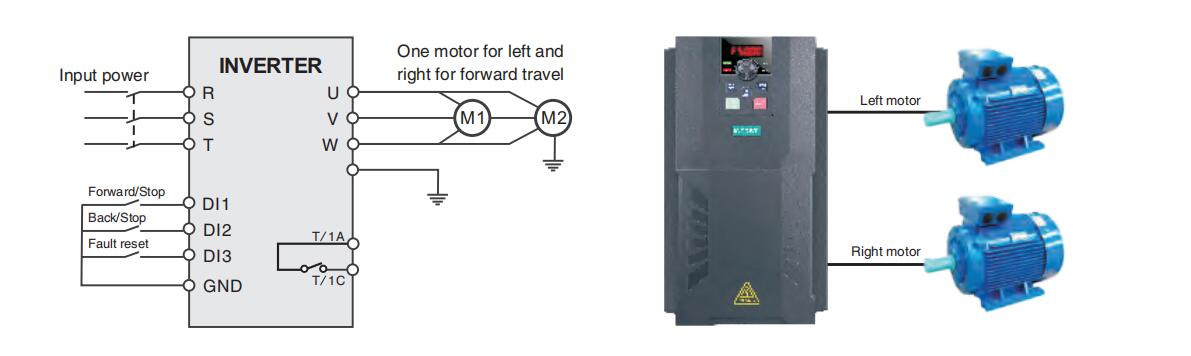
Diagrama de cableado sinxelo
Configuración de parámetrosng e descrición(parámetros de desprazamento do motor esquerdo e dereito)
| Parámetro | Explica | Configuración de parámetros | Explica |
| P0-00=0 | Control VF | P5-00=1 | adiante |
| P0-04=1 | Terminal externo arranque parada | P5-01=2 | levar a cabo máis tarde |
| P0-06=1 | Configuración de frecuencia dixital | P6-00=2 | Saída de fallo do relé 1 |
| P0-14=60,00 | Frecuencia máxima | P4-01=1,6KW | Potencia do motor conectado |
| P0-16=60,00 | Frecuencia límite superior | P4-02=380V | Tensión nominal do motor |
| P0-11=60,00 | Frecuencia de configuración dixital | P4-04=3,3A | Intensidade nominal do motor |
| P0-23=3,0s | Tempo de aceleración | P4-05=50Hz | Frecuencia nominal do motor |
| P0-24=2,0s | Tempo de desaceleración | P4-06=960R/Min | Velocidade nominal do motor |
| Nota: Cando se usa un conversor de frecuencia con dous motores, recoméndase encarecidamente instalar un relé térmico correspondente na parte frontal de cada motor para protexer cada motor. | |||
Análise do efecto da operación
O convertidor de frecuencia da serie KD600 realizou a transformación de conversión de frecuencia no sistema de viaxe, e o efecto de transformación é relativamente ideal, mostrado principalmente en:
- Realízanse o arranque suave e a parada suave durante o inicio, o que reduce o impacto na rede eléctrica;
- Despois de usar o conversor de frecuencia, omítense o contactor de cambio orixinal e a resistencia de regulación de velocidade, o que non só aforra o custo de mantemento, senón que tamén reduce o tempo de inactividade para o mantemento, aumentando así a saída;
- Cando o gancho principal funciona a 5Hz ~ 30Hz, o efecto de aforro de enerxía é moi obvio;
- O conversor de frecuencia úsase para controlar a viaxe dianteira e traseira, e as series de mecanismos de desprazamento esquerdo e dereito poden realizar o traballo de sobrefrecuencia. Baixo a premisa de garantir a seguridade, a eficiencia do traballo mellora moito e tamén se reduce a carga de traballo de mantemento dos equipos de viaxe debido á substitución frecuente de contactores de CA.
Palabras de peche
O conversor de frecuencia úsase para controlar a marcha dianteira e traseira e a serie de mecanismos de marcha á esquerda e á dereita, que poden realizar traballos de overclocking, mellorar considerablemente a eficiencia do traballo baixo a premisa de garantir a seguridade e tamén reducir a carga de traballo de mantemento dos equipos de condución debido á substitución frecuente de contactores de CA.
Sitio de aplicación

Hora de publicación: 17-novembro-2023